
汇集公众科学智慧 交流科学思想见解点燃科学智慧火花 构建互动交流平台
汇集公众科学智慧 交流科学思想见解点燃科学智慧火花 构建互动交流平台
一、基本原理
磁浮列车是一种采用磁力达到无接触的悬浮、导向和驱动的地面交通系统。根本上克服了传统列车轮轨粘着限制、机械噪音和磨损等问题,是一种理想的陆上交通工具。高速磁浮是继汽车、轮船、火车、飞机和管道运输之后,填补火车和飞机之间速度空白的新型交通运输系统。按照运行速度,磁浮列车可分为高速磁浮交通(运行速度范围400~600km/h,适用于远距离城市间交通)和中低速磁浮交通两种类型(运行速度范围100~160km/h,城市内、近距离城市间及旅游景区的交通连接)。
(一)按照悬浮机理分类
按照悬浮机理,磁浮列车可分为电磁吸引式、电动排斥式、超导钉扎式和永磁式等。
(1)电磁悬浮为主动式悬浮,即在电磁铁中通入直流励磁电流,产生的励磁磁场与导轨(中低速磁浮列车)或长定子电枢铁芯(高速磁浮列车)作用,产生吸力,从而将列车悬浮。额定悬浮气隙为8~12mm,不属于自稳定系统,需通过检测悬浮气隙,实时调节电磁铁励磁电流,保证多点悬浮的稳定性。
(2)电动悬浮为被动式悬浮,磁体与金属导体之间相对运动,产生涡流及感应磁场,与激励磁场相作用,产生排斥力。额定悬浮气隙为100mm左右,属于自稳定系统,无需另外施加控制,但阻尼较低。
(3)超导永磁钉扎悬浮由永磁体和非理想第二类超导体构成,永磁体沿轨道铺设,超导块材安装在车辆底部。非理想第二类超导体的缺陷形成的钉扎中心有很强的磁通钉扎作用,可以束缚永磁体的磁力线,使超导块材不脱离永磁轨道,从而实现自稳定的悬浮和导向。额定悬浮气隙为10~20mm,无需另外设置控制系统。
(4)永磁悬浮系统的轨道板由永磁体按照Halbach 阵列组合而成,铺设于轨道沿线的倒U型抱臂轨道板槽上,车载悬浮组采用相同的Halbach永磁结构,利用轨道板永磁组与车载永磁悬浮组之间的斥力,实现车辆转向架的整体悬浮。悬浮气隙一般在100mm。电磁悬浮系统用来实时对振动进行抑制,在车辆平稳运行状态下可实现列车的零功率悬浮。
(二)按照牵引电机分类
高速磁浮列车的牵引基于直线电动机。直线电机是一种将电能直接转换成直线运动机械能而不需要任何中间转换机构的装置。为保证行程范围内处、次级间耦合特性不变,将初、次级制成不同长度。因此,直线电机又可以分为短初级长次级型和长初级短次级型。
短初级直线电机在成本上更低,长初级直线电机可抵消边端效应,一般用于高速磁浮牵引应用。
二、国外高速磁浮交通系统技术现状与发展态势
(一)常导磁浮应用
1922年,德国工程师赫曼·坎珀创造性地提出了电磁悬浮原理。1987年,德国建成全线31.5公里的埃姆斯兰德试验线;1993年,实现450 km/h载人运行记录。2003年,常导磁浮列车在上海实现最高501km/h的运行记录。
高速磁浮系统涉及轨道、车辆、牵引供电及运控等四大子系统。牵引供电技术是高速磁浮交通技术中的四大关键技术之一。高速磁浮交通系统依靠电磁力实现列车悬浮、导向与牵引,实现了列车与轨道间垂向、横向和纵向的非机械接触,可以运行更高的速度;速度高、加速特性好、爬坡能力强。高速磁浮交通牵引供电系统主要由LSM、牵引变流系统和牵引控制系统等各部分组成。牵引系统根据运行控制系统的要求,对大功率电力电子变流系统的输出电压和电流的幅值、频率与相位进行实时地调节,分段地对列车所在的LSM轨道供电,从而实现对磁浮列车牵引力的有效控制,完成启动、恒速运行以及制动停车等各种运行要求,使列车高速、安全和舒适地运行。牵引供电系统为磁浮列车提供运行时所需要的牵引动力,是磁浮列车的动力来源,是实现“零高速飞行”的根本保障。
典型的高速磁浮交通牵引系统无论是基本原理还是架构都十分类似:(1)基于长定子直线电动机(以下简称LSM)和大功率牵引变流系统;(2)地面供电,不存在受流引发的诸多问题,可提供产生强大推力的电能,不存在车载设备所要求的防震、防污和防电磁干扰以及体积重量受限等一些列问题;(3)分段供电:为降低损耗,LSM定子绕组采用分段供电方式;(4)分区供电:根据线路状况和运行发车间隔,整个线路划分为数个不同的牵引供电分区,每个牵引分区只能运行一列磁浮列车。
上海高速磁浮示范线定子段换步方法为主线三步法,站内/支线为两步法。定子段供电方式为主线双端供电,站内/支线单端供电。正线区域高功率模块配置具备冗余性,任一高功率模块故障退出运行时,可用冗余模块对故障区域进行供电。基于德国TR磁浮技术的上海高速磁浮列车牵引供电系统采用两个直线电动机左右双侧供电、轨道双端供电和分布式牵引控制系统主从冗余控制,其牵引动力设置在地面(无防震动苛求,无体积重量限制),无弓-网和轮-轨接触,无脱轨风险。
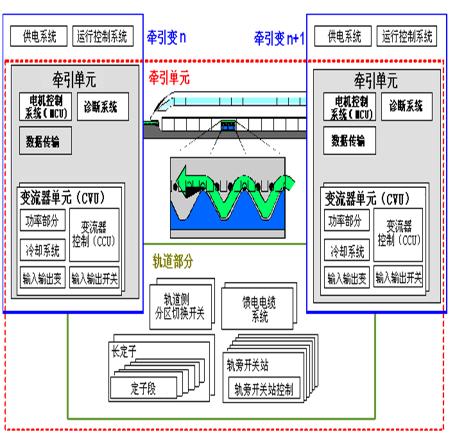
高速磁浮交通牵引供电系统结构
(二)超导磁浮应用
1970年,日本开始研究超导高速磁浮交通技术。2013,建成42.8km山梨磁悬浮试验线。2015年4月21日,日本铁路东海公司的L0高速磁浮列车在山梨线上创造了最高载人运行速度达603km/h的世界纪录。
建设中的中央新干线东京至名古屋一线长度为285.6公里,共6个车站和两个车辆段,总投资5.5万亿日元(约合2900亿人民币)。其中4万亿为轨道施工造价,剩余1.5万亿是车辆价格。2014年开始动工,2027年建成“东京-名古屋”段,“名古屋-大阪”段的通车则要到2045年。从东京到名古屋仅需40分钟,到大阪也就1小时7分钟。
(三)其它磁浮应用
美国在永磁悬浮Magplane管道运输系统、超导磁浮Maglev2000系统和气动悬浮Hyperloop真空管道磁浮系统等各个技术路线上都进行了积极的探索。
ELON MUSK提出的Hyperloop构想采用气动悬浮模式、胶囊小型车结构、空气压缩机推进和太阳能供电。Virgin Hyperloop悬浮导向系统采用永磁体和铝板构成的永磁电动悬浮(与Magplane悬浮技术一致),即被动悬浮,低速下依靠车轮支撑车体和导向,达到一定速度后轮子收起。悬浮磁极为充磁角度间隔90度变化的永磁体阵列,铝反应板沿管道铺设。
三、我国高速磁浮交通系统研究进展
2002年,国家科技部设立了“十五”863计划“高速磁浮交通技术研究”重大专项。2006年4月,上海同济大学1.5公里高速磁悬浮试验线建成。2007年,科技部启动“十一五”国家科技支撑计划“高速磁浮交通技术创新及产业化研究”重大项目;2012年,设立“十二五”科技支撑计划项目 “高速磁悬浮交通技术集成示范”。2016年:科技部设立“十三五”重点科技研发项目“高速磁悬浮交通关键技术研究与示范”,目标速度600km/h;2021年7月:时速600公里高速磁浮车下线。2023年4月,项目整体完成绩效评价。
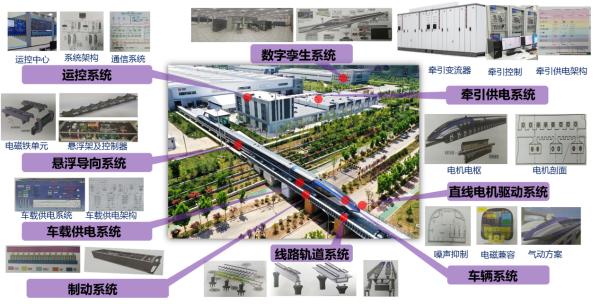
时速600公里高速磁浮试验线组成
中国科学院电工研究所进一步优化了既有牵引变流器的拓扑结构,采用有源中点箝位(ANPC)结构:与二极管箝位三电平变流器相比,不仅不需要大量的箝位二极管,而且母线中点电压可以通过算法加以控制,是一种非常经济实用的多电平拓扑。针对现有NPC三电平变流器拓扑结构的驱动装置损耗分布不均的不足之处,发明了基于预测控制的IGCT ANPC三电平变流器损耗均衡调制策略,使最大损耗降低30%,进而可以在开关器件和体积不变条件下使系统容量由18MVA进一步提高到24MVA。采用基于谐振观测器及控制器的高性能高鲁棒性的整流器闭环控制,在输入电压谐波较大的情况下,良好地实现中点电压平衡。实现逆变侧全速度范围空间磁场定向SVPWM-SHEPWM-方波平滑动态切换控制技术研究。突破了新型ANPC拓扑结构功率模块化单元、IGCT器件损耗均衡、中点电压平衡和PWM调制等技术难题,大幅提升变流器功率密度及性能。研制成功2台可双端供电的面向时速600公里高速磁浮交通用基于IGCT器件的24MVA 牵引变流器,多项技术指标达到国际先进水平,与国外同类变流器相比的功率密度提高20%。

电工所自主研制的2套四象限ANPC24MVA 牵引变流器

电工所自主研制的高速磁浮牵引控制系统
2022年10月,电工研究所阶段性建成的世界首个电磁推进地面超高速试验设施“电磁橇”并实现了成功运行,对于吨级及以上物体最高推进速度可达每小时1030公里,创造了大质量超高速电磁推进技术的世界最高速度纪录。
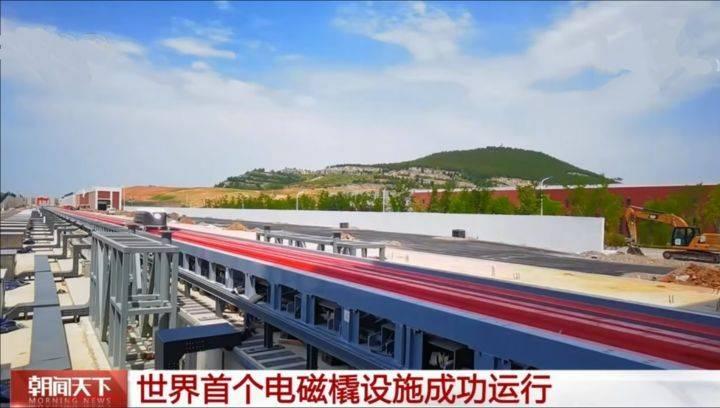
央视对电磁撬成功运行的新闻报告

中车长客建设的200米全要素高温超导磁浮交通试验线
中车长客在长春修建了200米全要素高温超导磁浮交通试验线。2023年3月31日,国内首套高温超导电动悬浮全要素试验系统完成首次悬浮运行,该系统采用高温超导零磁通电动悬浮、无铁芯LSM牵引,同样可以实现自悬浮、自导向、自稳定。
西南交通大学在真空管道高速超导钉扎磁浮交通方面进行了深入研究。建设了高温超导磁悬浮环形实验线,长45米,半径6米,直线感应电机为3米。载人速度25公里/小时,空车50公里/小时。研制了真空管道高温超导磁悬浮高速试验台:长142.6米,直径4.2米 ,0.05atm,悬浮间隙10/20mm、200kg,335km/h。

2021年1月,高温超导高速磁浮工程化样车在165试验线上
四、总结与展望
高速磁浮交通具有高速灵活运送大运量客流的能力,同时还有选线灵活、绿色环保等优势,是现代综合交通运输体系的重要组成部分。高速磁浮交通系统提供了介于高速轮轨铁路和航空之间这一速度范围内经济、技术最佳的陆上高速交通方式,比较适合于中长距离客流运输。
我国已基本掌握了常导高速磁浮交通核心技术,为自主研制系统设备的工程化应用奠定了坚实的基础。常导高速磁浮交通是我国高速磁浮交通工程应用的首选。真空管道交通系统将磁浮技术和真空管道技术相结合,是一种有望实现超高速且低能耗的地面轨道交通系统,但还处于研发初期,离工程化还有很长的路。
高速磁浮交通技术在中国率先进入工程应用,为我国在该领域创造了巨大的发展空间,在未来几年内有可能形成完整的应用技术体系,并在世界上占据领先地位。
