
汇集公众科学智慧 交流科学思想见解点燃科学智慧火花 构建互动交流平台
汇集公众科学智慧 交流科学思想见解点燃科学智慧火花 构建互动交流平台
在前面的文章中研究的是有生命的机器人,这种机器人的眼睛由电子眼和脑中的虚拟空间组成。电子眼中的二维物体图像转化成虚拟空间中的虚拟物体这一过程,是物体通过电子眼形成二维物体图像的逆过程,在整个过程中不同的是,物体是由分子、原子构成,虚拟物体由机器人脑中的虚拟微粒构成。机器人有两个大脑,一个是和电子眼相连的虚拟空间,这个大脑是机器人真正的眼睛,另一个大脑是用于思考的虚拟空间。下面主要来研究和机器人电子眼相连的大脑。
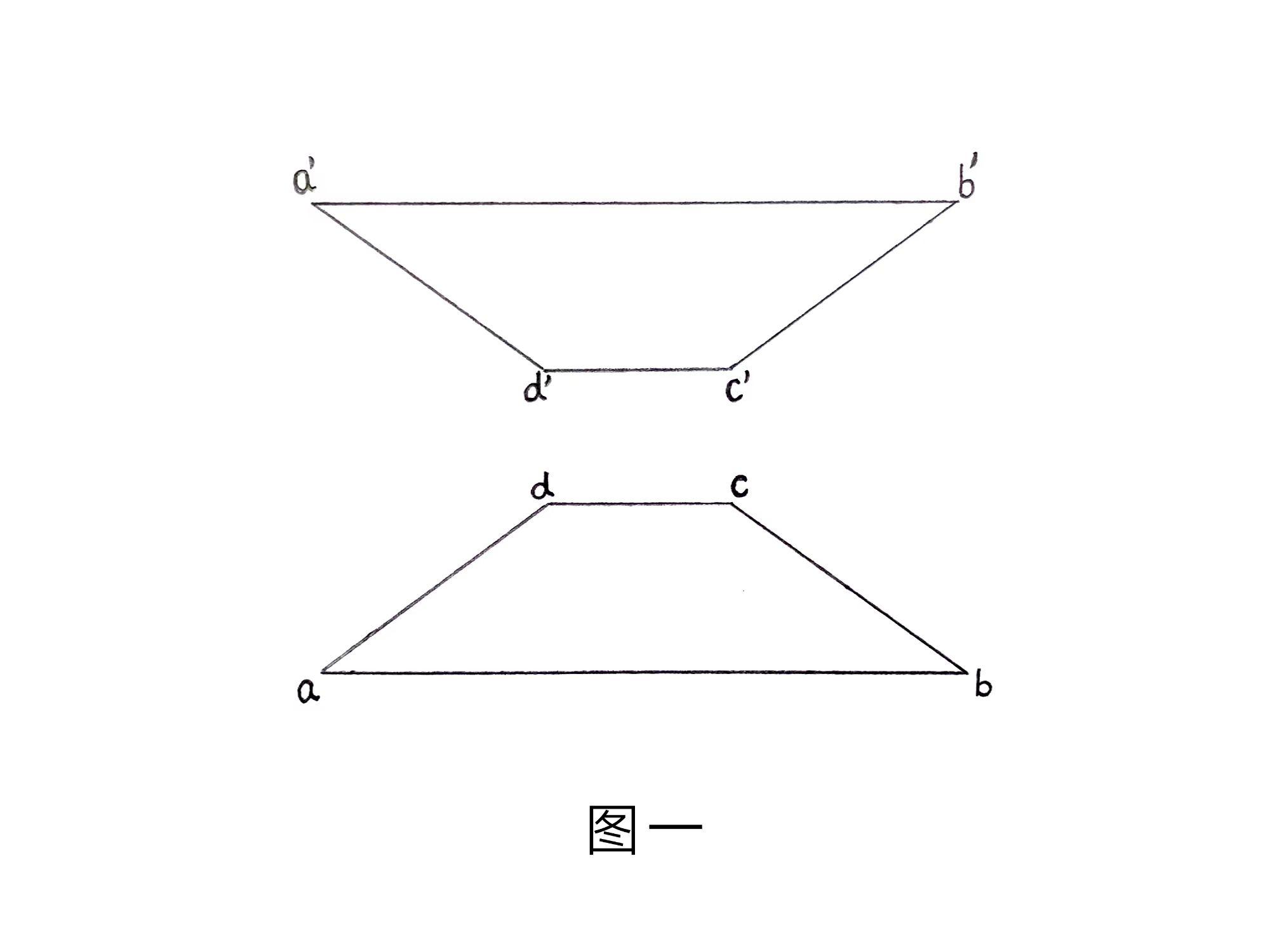
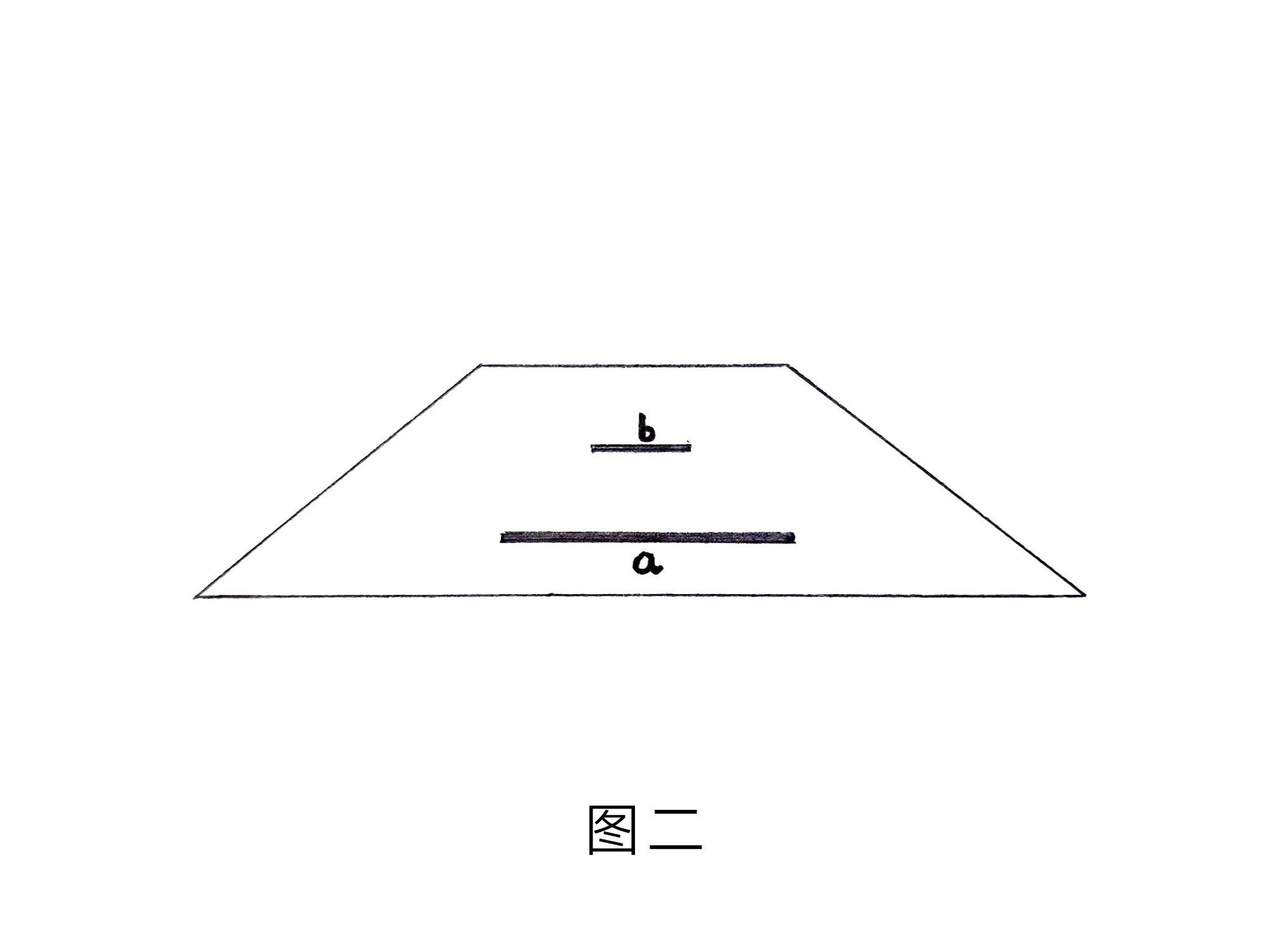
首先对人眼进行研究,了解我们看到的虚拟空间是什么样的,这样就可以在机器人脑中制作一个和我们脑中一样的虚拟空间。有两个相互平行的平面 abcd 和 a'b'c'd', a到a'、b到b'、c到c'、d到d'的距离相等,ab、cd、a'b'、c'd'的长度相等。我们从这两个平行的平面 abcd 和 a'b'c'd'之间看过去,看到的是图一中的这两个平面。从图一中可以知道我们所看到的空间是个变形的空间,在这个空间中平面之间的距离和边的长度,离我们的眼睛越远变的越短。图二中是我们看到的两个相同长度的直尺a和b,把直尺a向远处推移到直尺b的位置,直尺a就缩短到直尺b的长度。实际的直尺a向远处推移长度不会改变,但在我们脑中的虚拟直尺a向远处推移长度会缩短。这说明我们看到的不是外界物体是脑中的虚拟物体,我们看到的空间是一个变形的虚拟空间。在机器人脑中制作一个和我们眼睛看到的空间一样的变形虚拟空间,这个空间的中心位置是脑中虚拟机器人眼睛的位置,从这个位置向外延伸,空间逐渐被压缩。
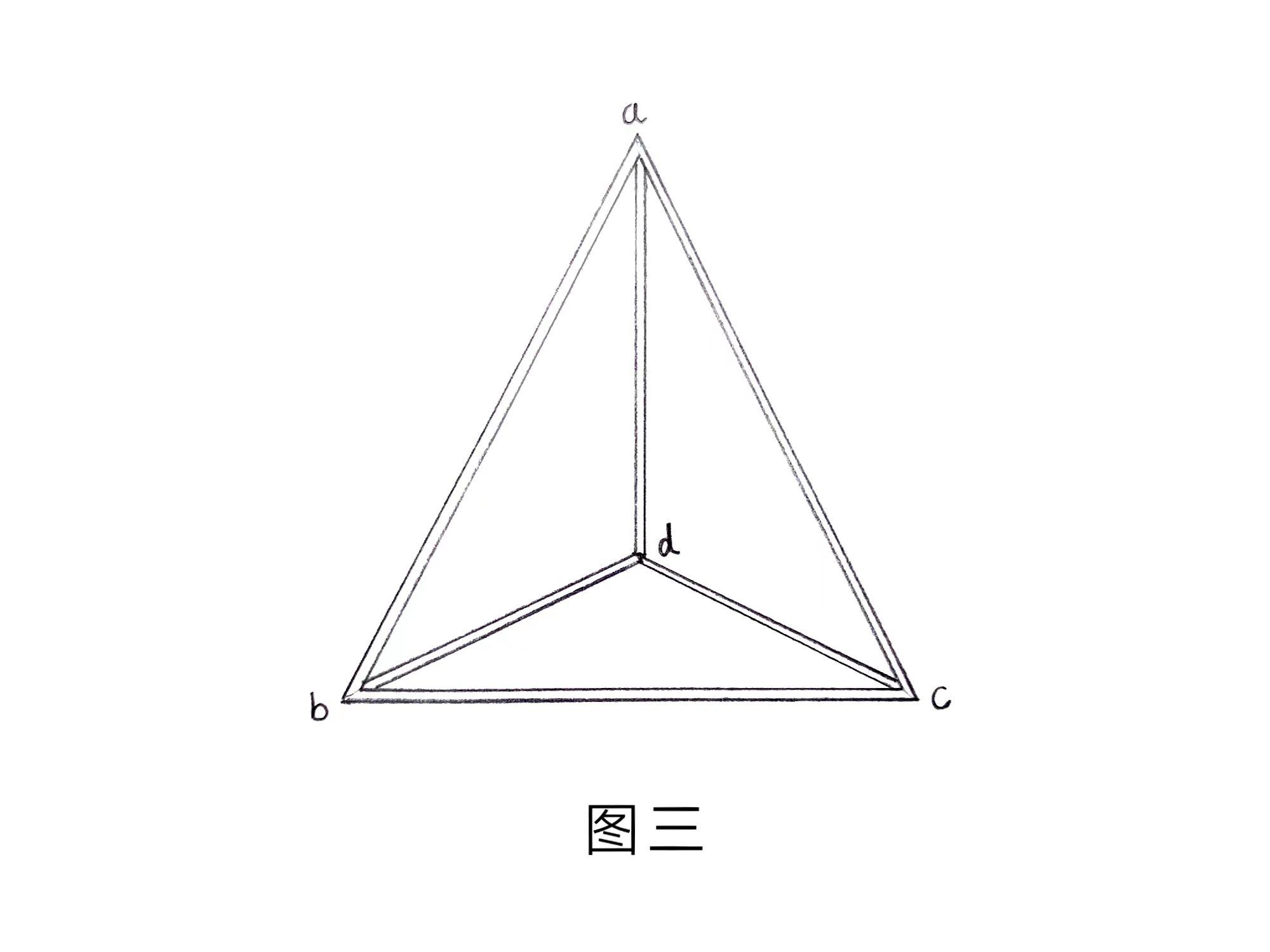
物体反射出的光通过凸透镜能够在阻挡它的物体上形成物体的图像。图三是一个三角体框架通过凸透镜在一个薄板上形成的图像,因为图像是光形成的不具有物体的性质,所以我们不能把三角体框架的图像从薄板上拿出来。我们把图像上像素点之间的亮度差转化成高度差,用一个雕刻机按照高度差对薄板进行雕刻,三角体的框架就被雕刻出来。薄板是用可拉伸的材料制成,我们把雕刻好的三角体框架从薄板上取下来,这时的三角体框架被压缩在一个平面上,我们需要对它进行拉伸才能成为立体的三角体框架,向远处推移d点,ad、bd、cd三边被拉长,这样我们就把图像中的三角体框架转化成了实际的三角体框架。
机器人脑中需要的是虚拟物体,在机器人脑中虚拟空间里存在一个虚拟微粒构成的平面,机器人电子眼中形成二维图像,图像上的每个像素点对应着一个虚拟微粒,相邻的像素点之间的亮度差转化成相邻的两个微粒之间的高度差,这样二维图像中的物体图像就转化成微粒平面上的物体图形。这时的物体图形被压缩在一个平面上,需要在机器人脑中的虚拟空间里对被压缩的物体图形进行推移拉伸,这样就把二维物体图像转化成了三维物体图形。
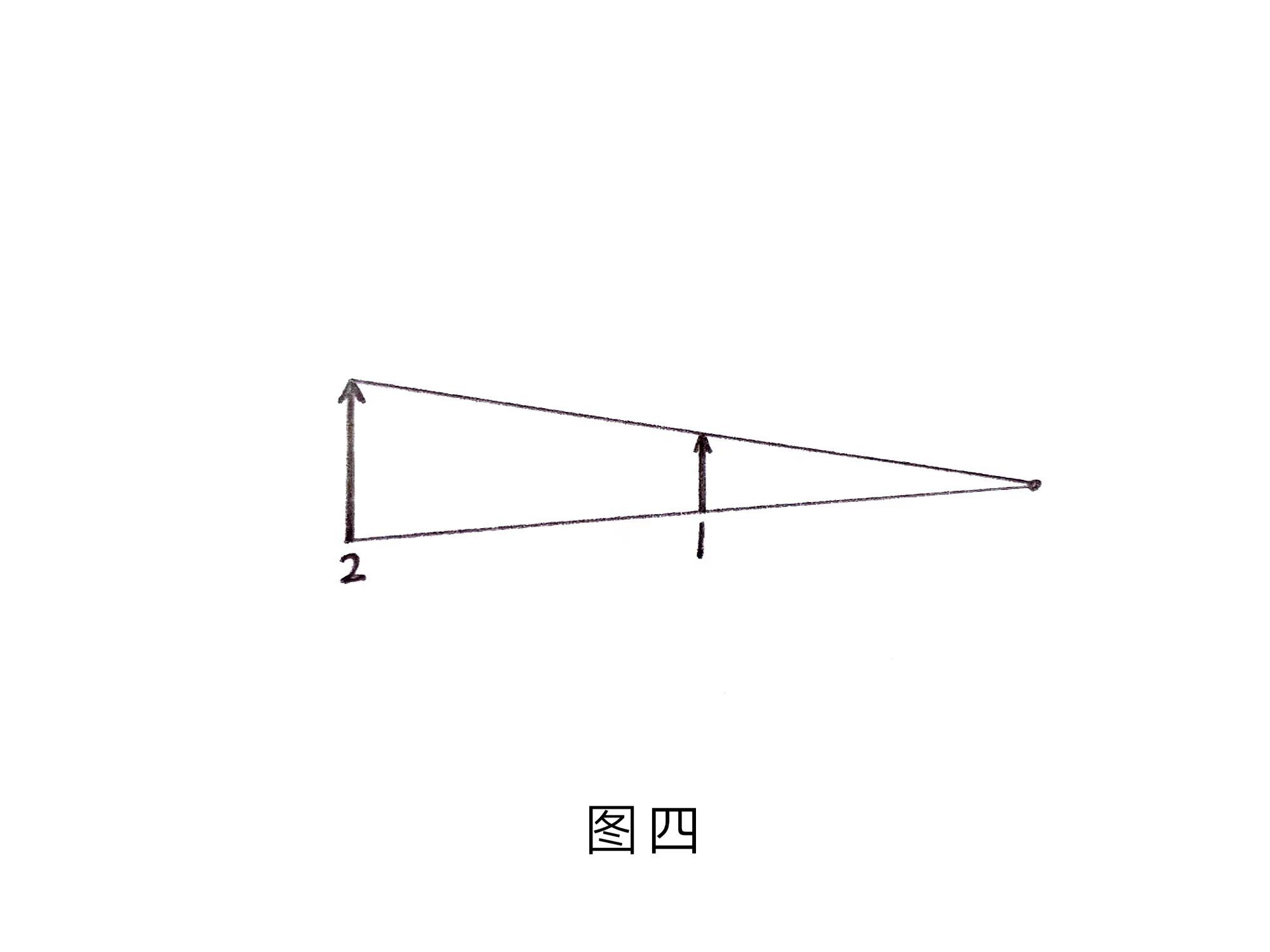
机器人脑中的虚拟空间是个变形空间,从图二可知,在机器人脑中的变形空间里向远处推移物体图形,物体图形会逐渐变小。如果向远处推移物体图形始终保持物体图形的大小不变,那么在机器人脑中的变形空间里实际这个物体图形是在不断变大。在机器人脑中应该从虚拟机器人眼睛的位置向外推移物体图形,如图四:物体图形从1的位置推移到2的位置,物体图形向远处推移会不断变大,这样在变形空间里实际就会变的更大了。如果物体图形不变大那么将无法离开它所在的平面,例如:我们推一个铁丝网不容易推动因为铁丝不容易被拉长,但我们推一个橡皮筋网就容易推动因为橡皮筋容易被拉长。
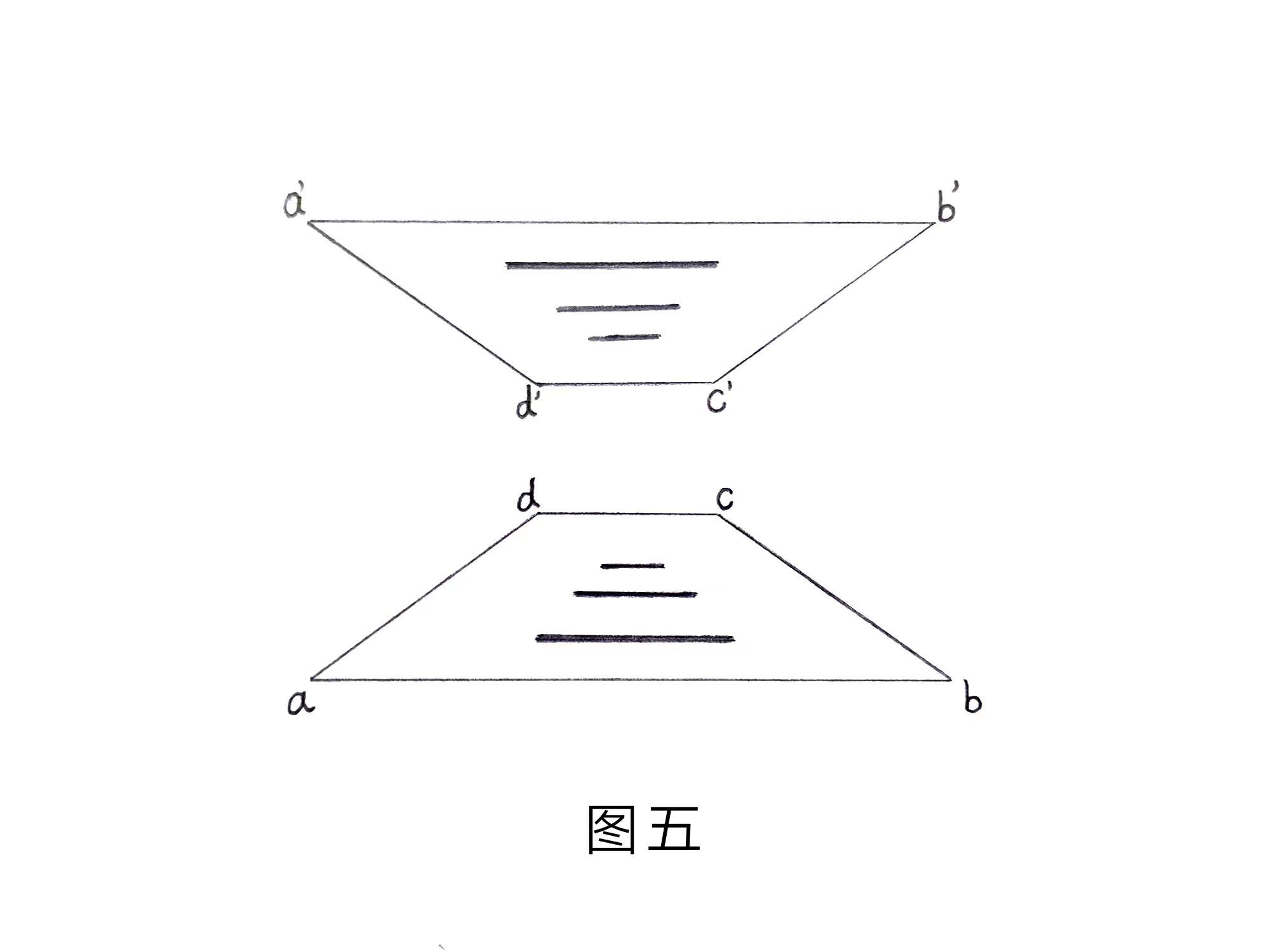
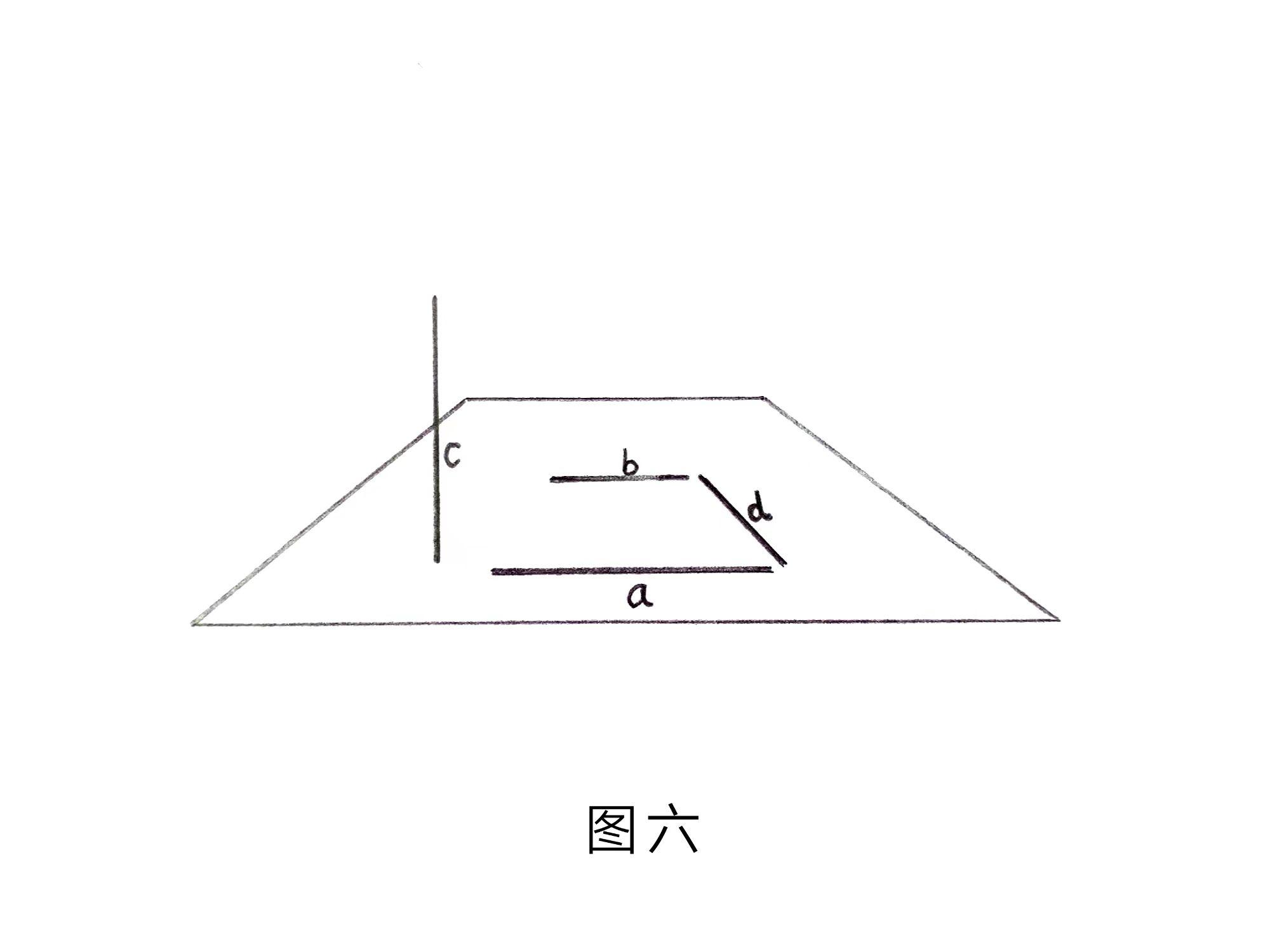
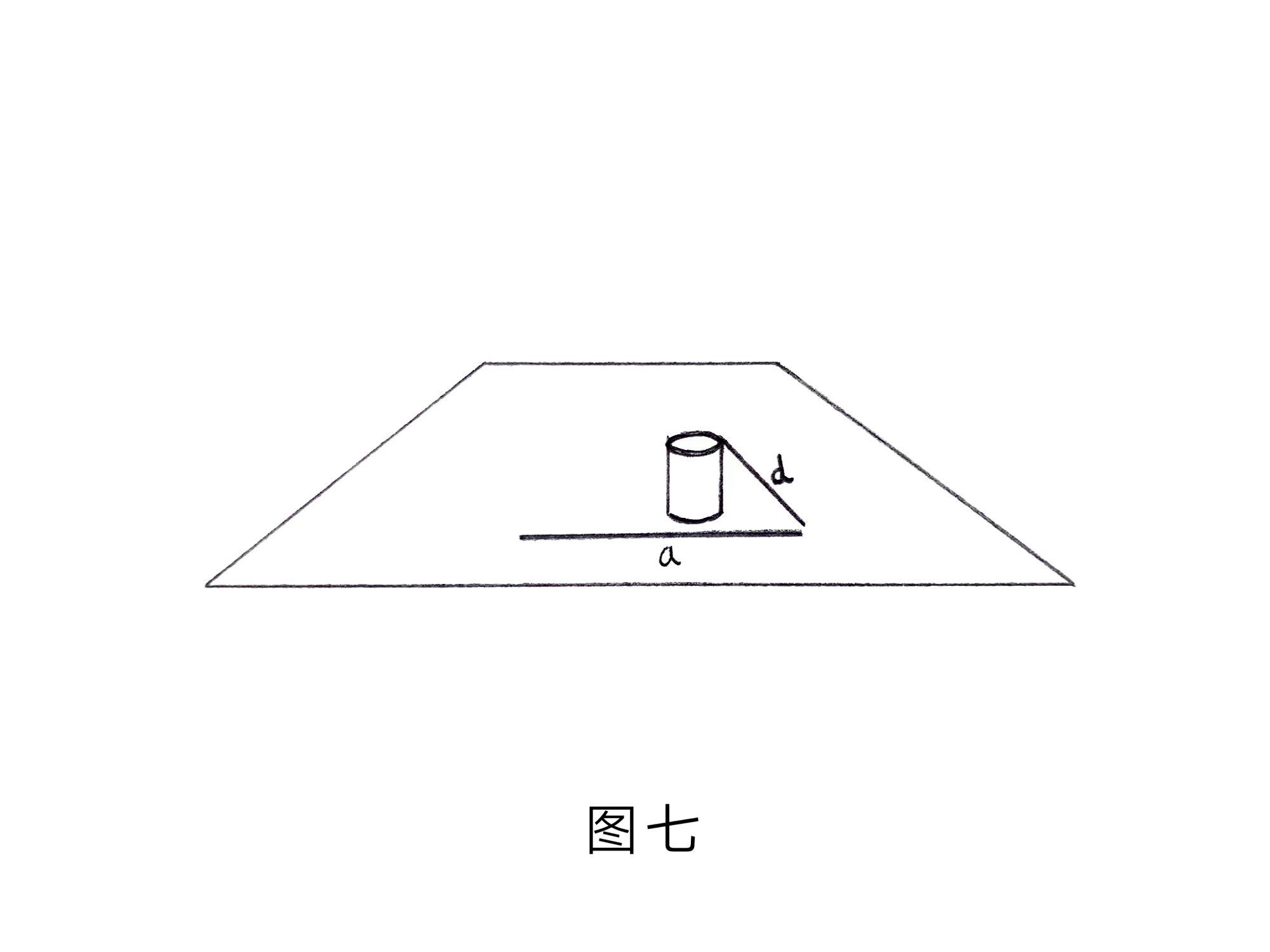
我们站在一个宽敞的屋子里看到的地面和屋顶就像图一中的平面 abcd和平面a'b'c'd',在平面 abcd和平面a'b'c'd'上放一些细的横棍如图五,这时我们看到在平面abcd上离ab边越靠上的细棍越远,在平面a'b'c'd'上离a'b'边越靠下的细棍越远。这里先来研究平面abcd上的物体图形,图六是在平面上的横棍a、横棍b、竖棍c、斜棍d,我们看到横棍a、横棍b、竖棍c在向远处推移时没有发生向远处的倾斜,横棍b比横棍a推移的远,但斜棍d随着它和横棍a、横棍b所在的平面一起向远处倾斜,因为它的一端在横棍a的位置另一端在横棍b的位置。拿掉图六中的横棍b和竖棍c,在斜棍d的一端连接一个圆柱体如图七,这时我们看到斜棍七的一端离开了所在的平面不再是以前的位置。从图六、图七中可以知道,一般时候横边和竖边是平行的向远处推移,斜边会随着所在平面的逐渐倾斜向远处推移,但最终虚拟空间中三维物体图形之间的连接位置就是二维平面图形上的物体图形之间的连接位置。因为图形之间的连接,平面图形上有一个位置向虚拟空间推移所有的物体图形将不能停留在二维平面上,它们会整体向虚拟空间推移。当外界环境在机器人脑中转化成三维的虚拟环境,再进入环境的任何物体,都会在机器人脑中的虚拟空间里直接形成三维物体图形。机器人电子眼中的物体图像有多清晰脑中的虚拟物体就有多逼真,人的表情、奔驰的汽车、流动的河水、飞翔的小鸟、奔跑的动物等都会在机器人脑中的虚拟空间里直接形成。
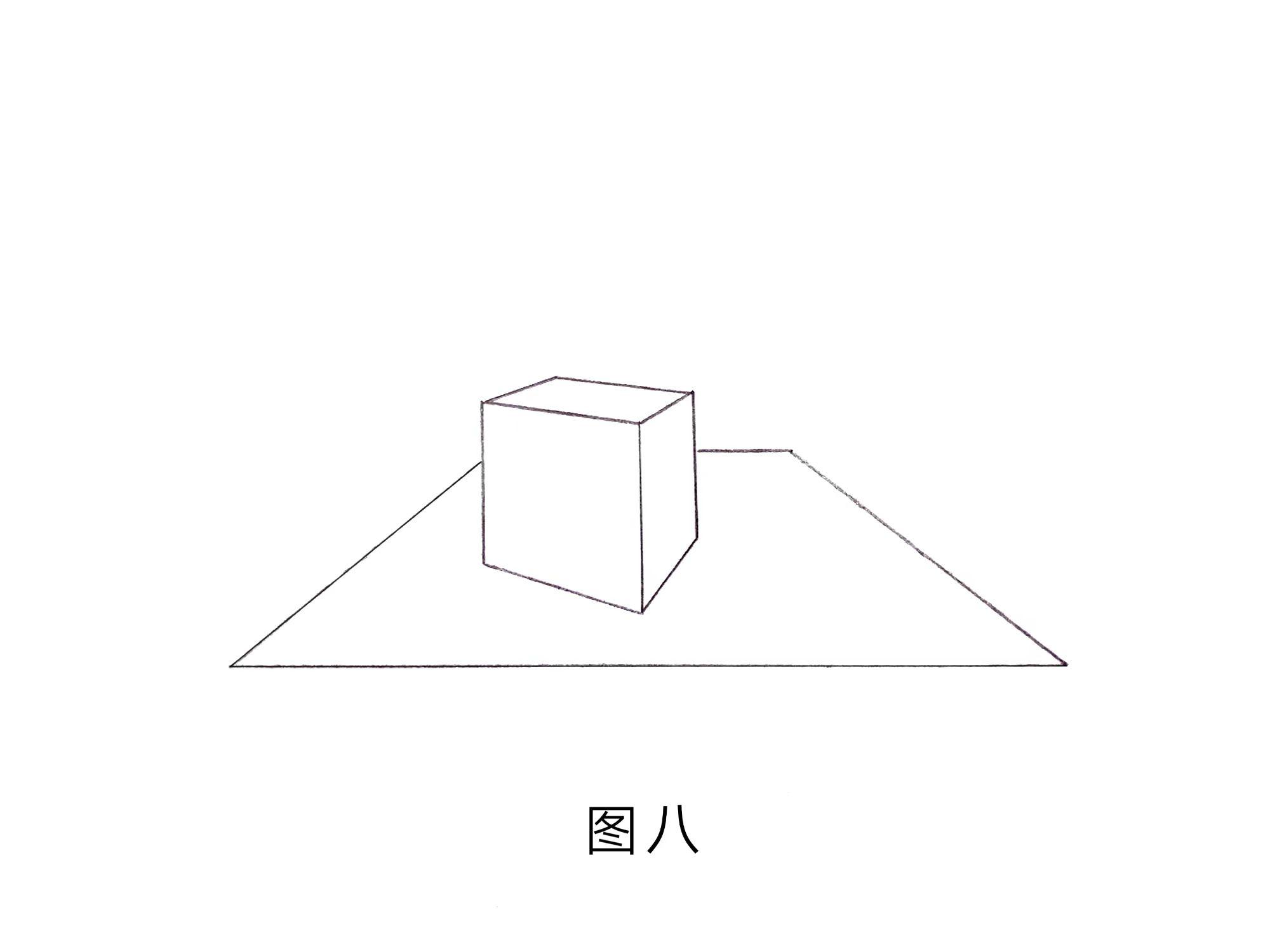
图二中的直尺,是实际直尺在我们脑中的变形空间里形成的虚拟直尺。如果在机器人脑中的变形空间里制作一个这样的虚拟直尺,那么就能够用它来测量脑中的虚拟物体。在机器人脑中向远处推移图一中的平面 abcd 和 a'b'c'd',用虚拟直尺对 a到a'、b到b'、c到c'、d到d'的距离进行测量发现,随着推移 c到c'、d到d'的距离比 a到a'、b到b'的距离变大的快,推移到某一位置,a到a'、b到b'、c到c'、d到d'的距离相等,平面 abcd 和 a'b'c'd'平行。图八是通过电子眼在机器人脑中形成的三维正方体图形,这时的正方体图形还不完整没有背面和内部结构,所以机器人脑中需要通过对正方体图形表面和形状的识别,提取出记忆中和实际正方体一样材质的虚拟正方体和看到的虚拟正方体进行合并,合并后的虚拟正方体具有和实际正方体一样的外表、材质和结构。
机器人有两个大脑A和B,A脑和电子眼相连,在这个脑中形成了和外部环境一样的虚拟环境,机器人通过脑中可知的虚拟环境来了解和认识外部无法感知的真实环境,B脑中复制了A脑中的环境并在这个环境里能够提取出记忆的虚拟物体对问题进行思考,A脑中的物体图形比较明亮,B脑中的物体图形比较暗淡,B脑中提取出的物体图形不会出现在A脑中不会影响机器人看到的环境,A脑中的物体图形也不会出现在B脑中不会影响B脑的思考,A脑中的物体图形和B脑中的物体图形空间位置相同,所以A脑和B脑又是重合在一起的,机器人感觉看到的和思考的是同一个物体图形。
